在阅读此文前,为了方便您进行讨论和分享,麻烦您点击一下“关注”,可以给您带来不一样的参与感,感谢您的支持。
编辑/江畔雨落
前言
谐波驱动器是能够产生高比率的动力传输机构,提供高定位精度,具有相对较低的重量体积比,高扭矩能力和接近零的背隙。
谐波驱动器于1955年发明用于航空航天应用,目前广泛用于机器人,医疗设备,印刷机,车辆和国防。
谐波驱动器有怎样的性能?又是怎样被应用到太空中的?
苛刻环境的要求
谐波驱动器在太空中使用主要是因为与传统齿轮系相比,在减速比方面具有良好的性能和良好的效率,通常谐波驱动器在空间中的工作温度范围限制在40°C至100°C之间。
航空航天工业对能够在低温环境下工作的机制的要求越来越高,由于传感器的信噪比随着温度的降低而增加,低温环境对于精确和精确的测量非常理想。
传统上使用谐波驱动器的太阳能电池阵列驱动机构或大型天线部署和指向机构,需要越来越苛刻的操作条件,在极低温度下传统机制会在轴承和牙齿中出现严重的摩擦学问题。
只有固体润滑剂如PFTE或二硫化钼才能在低温下作为溶液,然而对于长寿命运行,固体润滑剂不是一个非常可靠的解决方案,并且机构效率的降低非常显著。
具体来说,谐波驱动器机制的应用受到极低温度效率严重下降的限制,在低于-20°C的温度下,传统谐波驱动器的效率低于40%。
干润滑剂还存在光栅、离合、快速磨损、摩擦系数不稳定、冷焊中心形成以及在低温条件下损失或分解,这可以防止传统的带干式润滑剂的谐波驱动器在输入轴中的旋转速度超过500rpm。
由欧盟太空FP7资助的磁超导体低温非接触谐波驱动项目的目标是设计、建造和测试谐波驱动器的新概念。
磁铁、软磁材料和超导体之间的非接触相互作用,被有效地用于提供在低温环境中平稳自然地运行的高减速比齿轮。
传统谐波驱动器的限制元件被非接触式机械部件所取代,运动部件之间没有接触可防止磨损,不再需要润滑剂,并且使用寿命大大增加。
为了达到技术准备等级5,在低于60K和10的温度下设计、制造和测试了性能,包括最大速度、速比、效率、扭矩和负载能力。
设备的设计与分析
两种非接触式技术首次在一台机器中结合和优化,以创建第一个用于传递力和扭矩的绝对零摩擦驱动器,这两种非接触式技术是磁齿轮和超导磁浮轴承,
超导磁浮轴承是轴向和径向稳定的,而磁性齿轮是轴向稳定的,但径向不稳定,因此这种装置稳定性的条件必须是超导磁浮轴承的机械刚度必须大于磁齿轮的“负刚度”或不稳定性。
磁齿轮是扭矩速度转换的机制,它们的牙齿不会相互接触,而是配备了从一定距离施加力的磁铁。
与传统机械齿轮相比,磁齿轮有几个优点:无磨损、静音运行、减少振动、无需润滑、减少维护和提高可靠性,此外它们还提供本质过载保护,部件之间没有连接。
在谐波驱动器发明前几年,一种电动机被申请了专利,该装置包括高速轴和具有许多磁性齿的永磁化低速转子。
尽管本发明可以用作减速比为50:1的减速齿轮,但传递的扭矩很小,因为只有一个零件具有永磁化。
2001年,稀土磁铁用于由两个同轴、低速和高速转子组成的拓扑结构中,中间有几个钢制铁磁极件,采用二维静磁有限元方法仿真。
这个系统的一大优点是它是一个单级机械齿轮箱,具有相对较高的扭矩,可与两级和三级斜齿轮箱相媲美,还可以选择旋转方向。
2003年简化的同轴磁性齿轮箱原型的第一个实验结果被提出,它产生了类似的结果。
尽管磁齿轮开发有很大的背景,但它们大多经过优化以获得高扭矩密度,齿轮的其他机械方面,即齿轮理论、径向不稳定性、减振、齿隙和减速比可用性,到目前为止还没有被考虑在内。
磁超导体低温非接触谐波驱动原型中,减速比为20:1,这是第一次通过实验证明如此高的比例。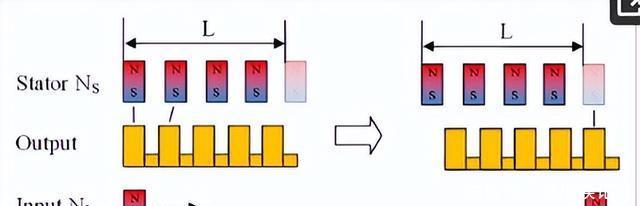
这个原型的基本网格单元由一个定子组成,该定子具有沿长度均匀分布的永磁齿,一个没有由软磁材料制成的齿的运动部件,最后由单个永磁体作为输入。
几个基本减速单元可以沿圆周重复多次,以构建相同比率的同轴齿轮。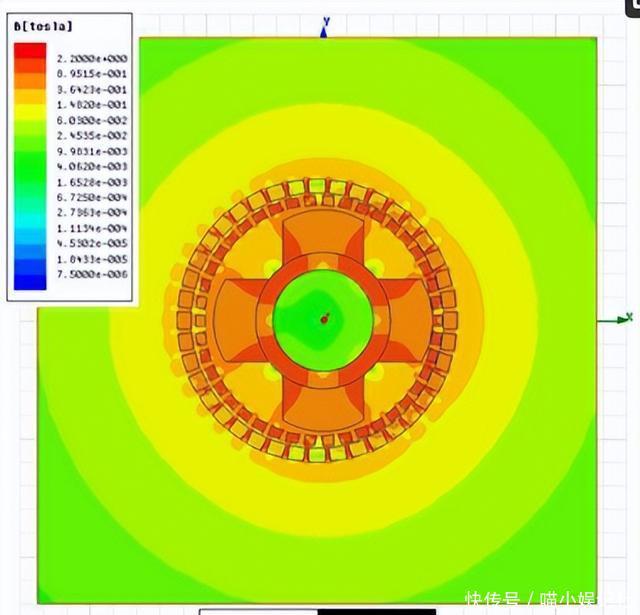
在原型中,外环作为输出,中间环作为定子,设计考虑了旋转部件之间的大气隙:输出和定子之间为1mm,输入和定子之间为2mm。
这种选择与高扭矩容量背道而驰,但对于超导磁浮轴承来说是一个保守的选择,以前从未将它组合在一个档位中,输入和输出轴必须支撑在两对超导磁浮轴承上,完全被动和非接触式。
磁性齿轮的旋转部件具有永磁转子的不稳定性,这对固定齿轮的轴承提出了刚度要求,当然,必须支撑每个轴的重量,以便出现轴向载荷。
在这项工作中,必须深入分析径向和轴向刚度的要求,因为它们对于超导磁浮轴承的设计至关重要,超导磁浮轴承的刚度远低于传统的机械滚珠轴承。
基于永磁体和超导磁悬浮的非接触式轴承还是比较有意义的,能够避免与极低温度接触相关的所有摩擦学问题,运动部件之间没有接触,因此不需要润滑。
超导磁浮轴承在许多领域找到了需要或优势的无接触的应用,用于空间应用的低温涡轮流量计,低温冷却器和灵敏陀螺仪,以及低温和空间机构的其他应用。
最近为了获得更稳定的悬浮位置,已经探索了磁体超导体的不同形状、尺寸和组合,有一些模型可用于描述这种相互作用。
它们可以应用于有限元程序,必须从机械工程师的角度考虑其他一些参数,才能充分设计超导磁浮轴承。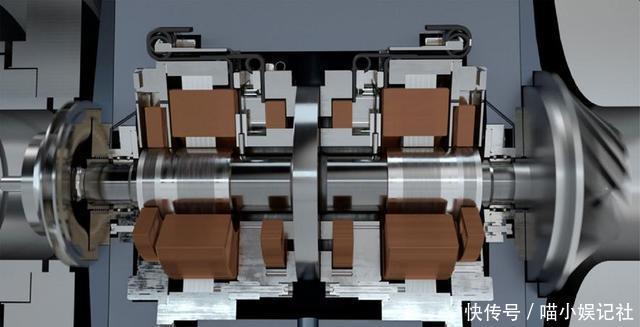
对超导磁浮轴承的机械性能进行了完整的机械实验表征,表征了超导磁浮轴承最大轴向和径向载荷、刚度和力松弛。
定义超导磁浮轴承的输入和输出总长度,可以满足磁齿轮失稳分析给出的要求,所需的径向刚度还取决于到磁齿轮位置的臂距。
两个浮动轴由启动锁系统固定,直到系统达到目标温度,一旦温度足够低,发射锁就会打开,它们可以自由漂浮在真空中,类似的启动锁系统概念已在多个设备中使用。
当车轴漂浮在高真空中时,唯一可能的加热源是辐射,由于浮动轴的辐射面积很小,辐射被认为可以忽略不计,因此在测试时,预计运行中的浮动轴的温度将接近释放前的温度。
整个系统必须在真空中以至少60K的功率进行测试,因此为每个部件选择的材料必须具有这些极端要求,它们在低温环境中的使用仍然是一个挑战,在这些条件下,润滑和疲劳是非同寻常的问题。
由欧盟空间FP7资助的磁超导体低温非接触谐波驱动项目的目标是设计,建造和测试磁超导体低温非接触谐波驱动的新概念。
磁铁、软磁材料和超导体之间的非接触相互作用被有效地用于提供在低温环境中平稳自然地运行的高减速比齿轮。
传统谐波驱动器的限制元件被非接触式机械部件所取代,运动部件之间没有接触可防止磨损,不再需要润滑剂,并且使用寿命大大延长。
对于磁性齿轮,永磁体选择了钐钴,软磁部件选择了mu-metal,外壳由顺磁性金属合金制成,钐钴磁体在低温下不会像钕铁硼磁体那样发生自旋重新定向转变,因此它们在60K时更稳定。
在高导热性、低导电性、低磁导率、相似的热收缩和足够的释气率之间进行权衡后,选择了周围的材料,零件由铝7075,不锈钢304和钛合金制成,调整了热真空室以及所有冷却和真空系统并准备进行操作测试。
整个传感系统由不同类型的传感器组成,安装的传感器包括:输入和输出扭矩和速度传感器,输入和输出旋转和非接触式传感器。
定子部分的六个内部温度传感,以及沿高度的四个磁场传感器以表征热和磁行为。
基于霍尔效应探头的非接触式位置和旋转传感器必须专门设计用于测量两个浮动轴的位置和旋转。
输入轴和输出轴分别需要两个位置和旋转传感器,为了使探头保持在正确的温度工作范围内,传感器有一个加热器和一个外部控制器。
友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com