友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com
相关文章
近七日浏览最多
最新文章
最近一段时间,有不少车友问过念寒一个比较难回答的问题,华为和特斯拉谁在智驾领域更胜一筹呢?
关于这个问题,其实念寒很早之前就想要说了,但出于保守还是忍住了,因为我觉得可比性不是很强,只能说是各有春秋吧。

事实上,不管是华为也好,还是特斯拉也罢,包括最近刚入场的小米,都在智能化浪潮中“厮杀”。而华为在面对市场竞争和智电变革的“下半场”时,确实展现了其强大的技术实力和创新能力。
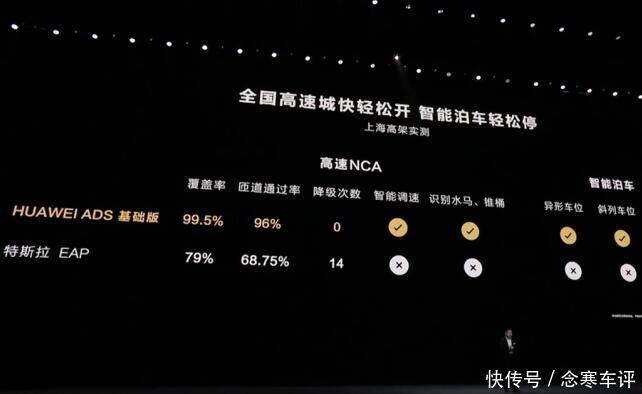
近日,在鸿蒙生态春季沟通会上,华为不仅重新发布了智界S7,而且还推出了全新的视觉智驾方案“HUAWEI ADS基础版”。这一方案的亮点在于它不依赖激光雷达,而是通过毫米波雷达和高清摄像头的融合来实现高级别的自动驾驶辅助功能。
相比传统的高阶智驾方案,华为的视觉智驾方案避开了依赖激光雷达的限制,转而采用毫米波雷达和高清摄像头来实现辅助驾驶,这种策略最显著的优势就是大大降低了装配成本。
尽管激光雷达的成本近年有下降趋势,但仍需要搭配高算力芯片才能最大化其潜力,因此,整体成本还是相对较高。
而华为在智界S7 Pro车型上就展示了其对视觉方案的实际应用。智界S7 Pro版采用了多达10个侧向与前后向感知摄像头、3个毫米波雷达及12个超声波雷达。

软件层面上应用了GOD通用障碍物检测网络和RCR道路拓扑推理网络,使得车辆可以在没有高精度地图的情况下实现高速领航功能。
值得一提的是,有不少媒体去实测过,华为的这套方案确实表现十分出色,无论是在高速导航还是泊车辅助方面,均能展现出优于特斯拉EAP版本的能力。甚至在没有激光雷达的支持下,其实力仍然可以与华为高阶智驾系统相媲美。

说到这儿,念寒估计肯定有不少车友会感到好奇,华为的视觉智驾方案与特斯拉的智能驾驶方案有何不同?
简单来讲,华为的视觉智驾方案与特斯拉的智能驾驶方案最显著的不同在于它们对核心硬件的选择及其对应的软件算法。
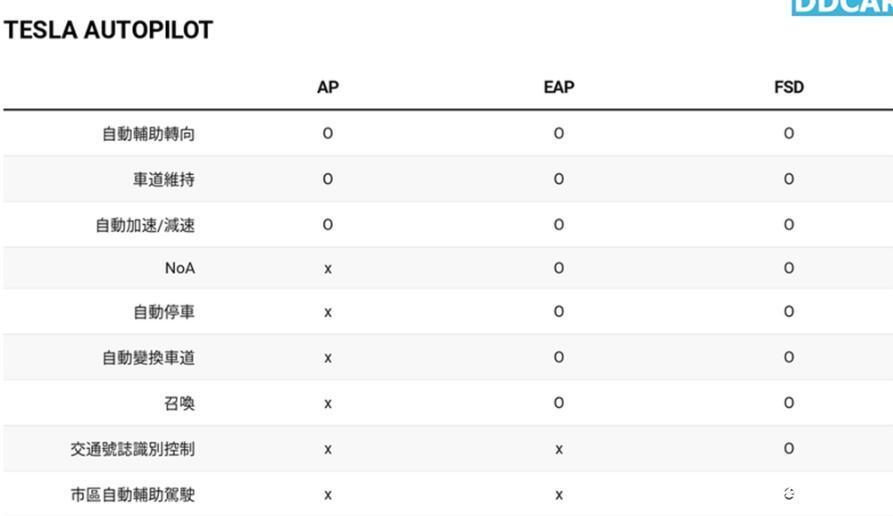
特斯拉采用的是一种主要依赖摄像头的方案,通过大量的摄像头获取车辆周边环境的视觉信息,然后利用深度学习技术和复杂的算法来解析这些信息,从而实现自动驾驶和辅助驾驶功能。

特斯拉的FSD(全自动驾驶)是一个为了实现完全自动驾驶而设计的系统,尽管它目前还未全面落地。特斯拉这种纯视觉方案的优势在于能够实现较高级别的自动驾驶功能,但在某些复杂环境下可能会遇到识别准确性的挑战。

华为的视觉智驾方案虽然也利用了高清摄像头收集视觉数据,但更加重视多种传感器的融合使用,包括毫米波雷达和超声波雷达。这样的多传感器融合方案,可以在单一类型传感器遇到限制时,通过另一类型传感器补偿,从而提高整体系统的鲁棒性和可靠性。

在软件层面上,华为还应用了如GOD通用障碍物检测网络和RCR道路拓扑推理网络等高级算法,以提高车辆感知和决策的准确性。

而且,华为在智驾方案中的一个重要亮点是,其系统不依赖高精度地图,就能实现高速导航等功能,这在技术实现上更具挑战性,但能在没有高精度地图覆盖的区域提供更好的服务。
其实讲白了,特斯拉的自动驾驶方案更倾向于通过大量摄像头和强大的画面解析能力来实现,主要依赖视觉信息。
而华为的方案在摄像头的基础上,大量应用了毫米波雷达和超声波雷达等其他传感器技术,通过多种传感器信息的融合来达到更为稳定和准确的自动驾驶辅助。两者各有特点,分别适应不同的市场和消费者需求。
根据华为目前的这一战略布局,在自动驾驶领域的技术储备和研发能力确实很有实力,同样也为未来智能驾驶技术的发展方向提供了新的可能性。

如果视觉智驾方案进一步成熟并得到市场的认可,华为的智驾系统可能会逐步向纯视觉方案转向,这将对整个智能驾驶行业产生深远的影响。

说实话,念寒认为最重要,且最实际的莫过于华为视觉智驾方案是否能够在消费者和制造商之间取得平衡?又能否成为一个广泛接受的市场标准?我觉得还有待市场的进一步验证。
但值得肯定的是,智界M7从发布至今的表现,加上华为背后的技术实力,已经让它成为了市场上备受瞩目的一颗新星。
友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com